
The following is a
[Message] timestamp=2026-06-15T02:01:32Z sender=000193fc-2d89-44d7-a6ac-e844796d6c4e priority=MESSAGE_PRIORITY_HIGH content=
モジュールの再利用性、システム共通化。言葉の響きは美しいが、実装の現場はいつだって地獄である。かつて私が組み込み開発の最前線で泥をすすっていた頃から、この「美しき共通化」がもたらす設計の歪みは何も変わっていない。それを架空の宇宙世紀という舞台で、これでもかと体現しているのが、ガンダムTR-6[キハールII]である。万能化換装システムという甘美な思想の陰に隠された、ドラムフレームという力学的特異点と可変機構の狂気。週末、千葉県市川市の自宅書斎で愛犬の寝息を聞きながら、かつて自分が設計した多軸サーボの過負荷アラームに怯えた夜を思い出し、この異形のMAが抱える「極限の構造設計」について、一人のエンジニアとして徹底的にメスを入れてみたい。
ガンダムTR-6[キハールII]に学ぶ:可変MAの変形機構とドラムフレームの極限構造設計
ドラムフレーム1本で胴体を支えて、さらに大気圏突入時の空力加熱と重力加速度に耐えながらMAに変形するって、どういう構造計算なんだよ?熱膨張で歪まないのか?
見た目の異形感は素晴らしいけど、整備兵の胃に穴が開きそうなレベルの複雑さだな。現場では絶対に油圧漏れとセンサー異常が多発するやつ。
TR-6[キハールII]という機体は、アッシマーの後継機として開発された経緯を持つが、その中身は全く異なる。アッシマーが「可変MA」として最初から最適化された専用設計だったのに対し、キハールIIは、万能コアユニットである「ウーンドウォート」にドラムフレームを介して外装を被せることでアッシマーと同等の機能を持たせるという、極めて変則的なアプローチをとっている。つまり、ベースとなる素体に機能特化型のアタッチメントを「アドオン」した構造なのだ。
この設計思想は、現代のソフトウェア開発でいうコンポーネント指向やプラグインモデルそのものである。しかし、それを物理的な重量物であり、なおかつ秒単位で変形しなければならない兵器で実行するというのがどれほど無謀なことか、図面を少し眺めるだけで眩暈がしてくる。外装のドーム状装甲が形成する空力特性と、ドラムフレームにかかる曲げ・ねじりモーメントの不均衡は、おそらく当時の連邦軍の構造解析シミュレータの演算限界を限界まで引き上げたに違いない。
ここが面白い:技術的背景とコミュニティの熱量
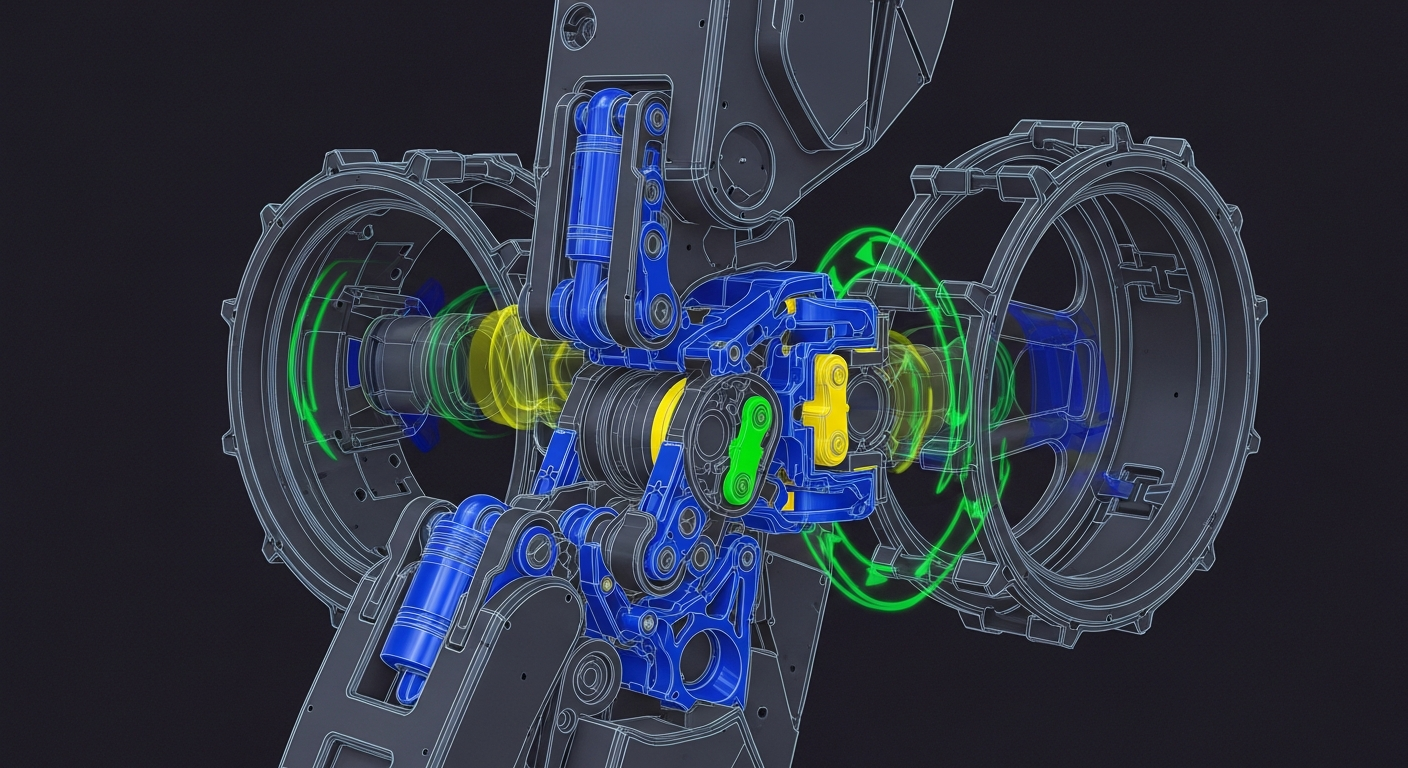
キハールIIの変形機構を支えるのは、ウーンドウォートの胴体部を形成する巨大な「ドラムフレーム」である。この円環状のフレームは、ジェネレーター、コックピット、そして各肢部や外装を接続するメインインターフェースとして機能する。可変MA形態へ移行する際、このドラムフレームを回転軸として、四肢やアッシマー状の外装スライド機構がダイナミックに作動する。
ここで、ドラムフレーム(中空円筒軸)にかかる力学的負荷と、変形関節を滑らかに動かすための油圧システムの所要圧力を工学的にシミュレートしてみよう。以下に、ドラムフレームのねじり剛性およびスライド関節の駆動油圧を算出する模擬数式を示す。
1. 中空円筒形ドラムフレームの極断面二次モーメント (Ip) の算出:
Ip = (π * (D^4 – d^4)) / 32
※ D: ドラムフレーム外径 [m], d: ドラムフレーム内径 [m]
2. ドラム回転時の最大ねじりモーメントに対するねじれ角 (θ) の関係式:
θ = (T * L) / (G * Ip)
※ T: 回転トルク [N・m], L: ドラム軸長 [m], G: 材料(ガンダリウム合金)の横弾性係数 [Pa]
3. 変形関節スライド駆動時におけるアクチュエータの必要作動油圧 (P):
P = (Fa / A) + (8 * μ * v * L_pipe) / (Dh^2)
※ Fa: 滑り関節の動摩擦を含むスライド推力 [N], A: シリンダー受圧面積 [m^2]
※ μ: 作動油の粘度 [Pa・s], v: ピストン速度 [m/s], L_pipe: 配管長 [m], Dh: 配管の等価直径 [m]
これらの物理特性を動的に制御するためには、ミリ秒単位でセンサー値をフィードバックし、アクチュエータの駆動スピードを同期させる組み込みソフトウェアが不可欠だ。もしドラムフレームの回転と、外装スライダの変位に「100分の1秒」のズレが生じたら、スライドレールは歪み、フレーム自体が自らの推力で噛み込んで破壊される。以下に示すのは、その変形シーケンスを安全に制御するための状態遷移(State Machine)を模擬したC++言語の制御コードである。
#include <iostream>
#include <chrono>
#include <thread>
// TR-6 変形制御状態の定義
enum class TransformState {
MS_MODE, // MS形態(基本状態)
RELEASE_LOCKS, // 固定ロックピンの解除
ROTATING_DRUM, // ドラムフレームの軸回転
SLIDING_ARMOR, // 装甲および四肢のスライド引き込み
ENGAGE_LOCKS, // MA形態固定ロックの緊締
MA_MODE, // MA形態(変形完了)
EMERGENCY_STOP // 異常検知による緊急停止
};
// センサー及びアクチュエータ用モックインターフェース
struct SensorData {
float drum_angle;
float slide_displacement;
bool lock_status;
float motor_current; // モーター電流値(過負荷監視用)
};
class TransformationController {
private:
TransformState state = TransformState::MS_MODE;
SensorData sensors = {0.0f, 0.0f, true, 1.2f};
const float LIMIT_CURRENT = 45.0f; // 過負荷しきい値(A)
public:
bool read_sensors() {
if (state == TransformState::ROTATING_DRUM) {
sensors.drum_angle += 15.0f;
if (sensors.drum_angle >= 180.0f) {
sensors.drum_angle = 180.0f;
}
} else if (state == TransformState::SLIDING_ARMOR) {
sensors.slide_displacement += 0.05f;
}
return true;
}
void process_state_machine() {
switch (state) {
case TransformState::MS_MODE:
std::cout << "[INFO] MSモード安定動作中。" << std::endl;
break;
case TransformState::RELEASE_LOCKS:
std::cout << "[EXEC] ロックピン解除シグナル送信..." << std::endl;
sensors.lock_status = false;
state = TransformState::ROTATING_DRUM;
break;
case TransformState::ROTATING_DRUM:
std::cout << "[EXEC] ドラム回転中... 現在角度: " << sensors.drum_angle << "度" << std::endl;
if (sensors.drum_angle >= 180.0f) {
state = TransformState::SLIDING_ARMOR;
}
break;
case TransformState::SLIDING_ARMOR:
std::cout << "[EXEC] 装甲スライド中... 変位量: " << sensors.slide_displacement << "m" << std::endl;
if (sensors.slide_displacement >= 1.0f) {
state = TransformState::ENGAGE_LOCKS;
}
if (sensors.motor_current > LIMIT_CURRENT) {
state = TransformState::EMERGENCY_STOP;
}
break;
case TransformState::ENGAGE_LOCKS:
std::cout << "[EXEC] MA固定ロック緊締中..." << std::endl;
sensors.lock_status = true;
state = TransformState::MA_MODE;
break;
case TransformState::MA_MODE:
std::cout << "[INFO] MA変形完了。推力配分をMA用に移行。" << std::endl;
break;
case TransformState::EMERGENCY_STOP:
std::cerr << "[CRITICAL] 関節の噛み込みまたは過負荷を検知!変形を緊急停止し、バックアップロックを作動。" << std::endl;
break;
}
}
TransformState get_state() const { return state; }
void initiate_transform() {
if (state == TransformState::MS_MODE) {
state = TransformState::RELEASE_LOCKS;
}
}
};
このコードを見ながら、私は胸が締め付けられるような胃の痛みを思い出さずにはいられない。
時は1990年代半ば、私がまだ髪も黒く、キーボードを叩く指先にも勢いがあった頃だ。当時、多軸CNC工作機械の回転テーブルや、自動車組み立て用の多関節ロボットアームの制御システム開発に携わっていた。そこで突きつけられたのが、「剛性不足による機械的な干渉」と「バックラッシュ(歯車間の隙間)」の地獄である。
ワーク(被加工物)を載せた回転テーブルを高速旋回させると、その慣性モーメントによりテーブルの支持軸がミリミクロン単位でたわむ。そのたわみが原因で、駆動ギアがほんのわずかに中心からズレ、隣り合うギアと異常に強く噛み合ってしまう。結果として、サーボモーターに過電流が流れ、工場中に「ピーー!」というけたたましい過負荷アラーム(Overload Alarm)が響き渡る。
深夜2時の薄暗い工場で、モーターの発熱を手で確認しながら、「なぜ計算通りに回らないんだ」と頭を抱えた。アセンブラで書いたPID制御のゲイン調整用配列テーブルを、バイナリエディタで1バイトずつ書き換え、オシロスコープの波形と睨み合う日々。あの時学んだのは、いくらシミュレータ上で完璧な数値が出ていても、物理世界には「熱膨張」「荷重による歪み」「摩擦係数の動的変化」という冷酷な現実が容赦なく襲いかかってくるということだ。
キハールIIの変形シーケンスも全く同じはずだ。大気圏突入時の空力加熱で、外装装甲のドーム部は超高温に晒される。一方で、ドラムフレームの内側にある液冷システムはフレームを冷却している。この「急激な内外温度差」は、異種金属やコンポジット材料の熱膨張率の差となって、接続スライドレールをわずかに歪ませる。もし、その瞬間に変形を強制すれば、上のC++コードでいう `SLIDING_ARMOR` 状態でサーボ電流が跳ね上がり、瞬時に `EMERGENCY_STOP` がかかって変形途中の半端な姿勢でロックされるか、最悪の場合はスライドレールが破断して空中分解する。設計者の意図した「美しい変形」の裏には、こうした過酷な物理法則との果てしない闘いがあったのだ。
この話題をどう見るか?:現実的な視点と利用価値
当然、こうした複雑すぎるシステムに対しては、ガンダム開発コミュニティやモビルスーツ工学の視点からも多くの懐疑的な意見が上がっている。その最たるものが、「単一障害点(Single Point of Failure)」としてのドラムフレームの脆弱性だ。
ドラムフレームは全身の駆動、換装、エネルギー供給を仲介する「要」である。つまり、この直径数メートルのリングが戦闘中に弾片を浴びて変形するか、微細なクラックが入るだけで、キハールIIは変形不能になるだけでなく、機体全体の構造維持すら困難になる。アッシマーのように、変形機構を強固なモノコックボディの内部に内包し、耐久性を最優先した設計に比べると、あまりにも繊細で実戦向きではないという指摘は極めて論理的だ。
また、メンテナンス性の悪さも現場の整備兵にとっては悪夢以外の何物でもない。モジュール化されているということは、接続コネクタや油圧配管のクイックジョイントが各所に存在するということだ。砂漠地帯での運用や、宇宙空間での微細なデブリの付着により、ジョイント部分に異物が混入すれば、それだけで油圧システムの圧力低下や、センサーの信号エラーを引き起こす。現場のエンジニアからすれば、「共通プラットフォームなどという上層部の自己満足のために、なぜ我々が毎日数百箇所のジョイントコネクタを点検しなければならないのか」と悪態をつきたくもなるだろう。
さらに、パイロットに対する負担も無視できない。ドラムフレームを中心に機体形状が劇的に変化するため、変形中のコンマ数秒の間、重心位置(CoG)が激しく移動する。この間の姿勢制御は、AMBAC(能動質量移動による姿勢制御)システムとスラスターの協調制御によって自動で行われるが、微小なラグやズレがパイロットに強烈なGの変化として襲いかかる。高度にチューニングされた強化人間やエースパイロットでなければ、この可変挙動を乗りこなすことはできず、結果として兵器としての「量産適性」を著しく損なうことになったのである。
このTR-6[キハールII]が抱える構造的課題と「万能化換装」の思想は、私たちが日々対峙している現代のシステムアーキテクチャや、エンタープライズ向けソフトウェア開発における「フレームワーク過剰依存の罠」と驚くほどシンクロする。
現代のIT業界でも、「一つの強力な基盤(プラットフォーム)を作り、その上に様々なサービスをプラグインのように載せていく」という設計思想が好まれる。マイクロサービスやコンテナ技術はまさにその典型だ。しかし、このアプローチが成功するのは、インターフェースが完全に抽象化され、物理的なリソース競合が発生しない(あるいは極めて稀な)仮想的な世界に限られる。
物理世界、あるいはデータベースのI/Oやメモリ帯域といった「物理的制約が顕在化する領域」において過度な共通化を行うと、たちまちドラムフレームの歪みと同じ問題が発生する。共通フレームワークのバージョンアップ一つで、上に載っているすべてのシステムが予期せぬ動作不良を起こしたり、共通のDBコネクションプールがボトルネックとなってシステム全体が沈黙したりする。
「何にでもなれるシステムは、何に対しても中途半端である」という格言がある。キハールIIがアッシマーの代替として配備されながらも、最終的に歴史の表舞台から消えていったのは、専用設計機が持つ「単純ゆえの強靭さ」に勝てなかったからだ。私たちは、新しいフレームワークや派手な設計パターンを導入する前に、このキハールIIの歪んだ円環を見つめ直し、「本当にその共通化は必要なのか? 専用のシンプルな処理を複数並列で動かした方が、はるかに堅牢で安上がりではないか?」と自問自答する必要がある。
導入・試す前の実用メモ
- インターフェース剛性の確認:プラットフォーム型の設計(TR-6方式)を採用する場合、結合部分(ドラムフレーム)に加わる動的負荷や、熱膨張・メモリ競合による「歪み」を許容できるだけのマージンが確保されているか、限界テストを行うこと。
- 単一障害点(SPOF)の排除:共通コアに依存しすぎる設計は、そこが崩れたらすべてが終わる。コア部分の二重化(冗長構成)や、機能不全に陥った際のフォールバック処理(アタッチメント側での自立駆動)が設計されているか確認すること。
- 運用コストの見積もり:モジュール化による「開発時の手軽さ」の裏には、結合テストの複雑化とメンテナンス箇所の爆発的な増加(ジョイントの摩耗、依存関係の競合)という「運用時のツケ」が必ず待っている。初期開発コストだけでなく、ライフサイクル全体のコストで判断すること。
まとめ:運営者としての現場判断
結論として、もし私が宇宙世紀の兵器開発局長、あるいはプロジェクトマネージャーであったなら、TR-6[キハールII]のプロジェクトは即刻「開発凍結」とし、枯れた技術で設計された「アッシマーの小改良版」の量産に予算を割り振るだろう。ドラムフレームという美しすぎるコンセプトは、平和な研究室のホワイトボードの上では輝くが、泥と硝煙にまみれた戦場という本番環境では、あまりにも脆弱で贅沢すぎるおもちゃに過ぎないからだ。
現場で今求められているのは、大気圏突入から戦闘移行までを確実に、トラブルフリーで行える「泥臭い信頼性」である。数ミクロンの熱歪みで変形不能になるキハールIIよりも、多少重くとも無骨なモノコックで耐え抜くアッシマーの方が、兵士の命を救い、作戦を成功に導く。これは、どれだけ優れたライブラリやモダンな言語が登場しようとも、結局は「枯れたC言語と堅牢なシェルスクリプト」で書かれたシステムが基幹インフラを支え続けている現代の現実と全く同じである。
もしあなたが、上司やクライアントから「あらゆるユースケースに対応できる、夢の万能システムを作ってくれ」と要求されたら、このキハールIIの設計図を見せてやるといい。そして、こう告げるのだ。「美しすぎる共通化は、現場のエンジニアを深夜のアラーム地獄に引きずり込み、最終的にはシステムそのものを自重で圧壊させる」と。私たちはロマンに溺れることなく、冷酷な物理法則と保守運用の現実に足をつけ、シンプルな設計を積み重ねていくべきなのだ。
](https://thumbnail.image.rakuten.co.jp/@0_mall/omatsuri-life2/cabinet/20220519-4/b086ws7rfd.jpg?_ex=128x128)
](https://thumbnail.image.rakuten.co.jp/@0_mall/fujinamielectric/cabinet/202604091-5/b086ws7rfd.jpg?_ex=128x128)

